1629X Worlds 2025
Designed and built for the 2025 VEX Robotics World Championship, this robot showcases months of precision engineering, autonomous algorithm development, and mechanical optimization. Every subsystem was tuned for real-world reliability under high-speed competition.
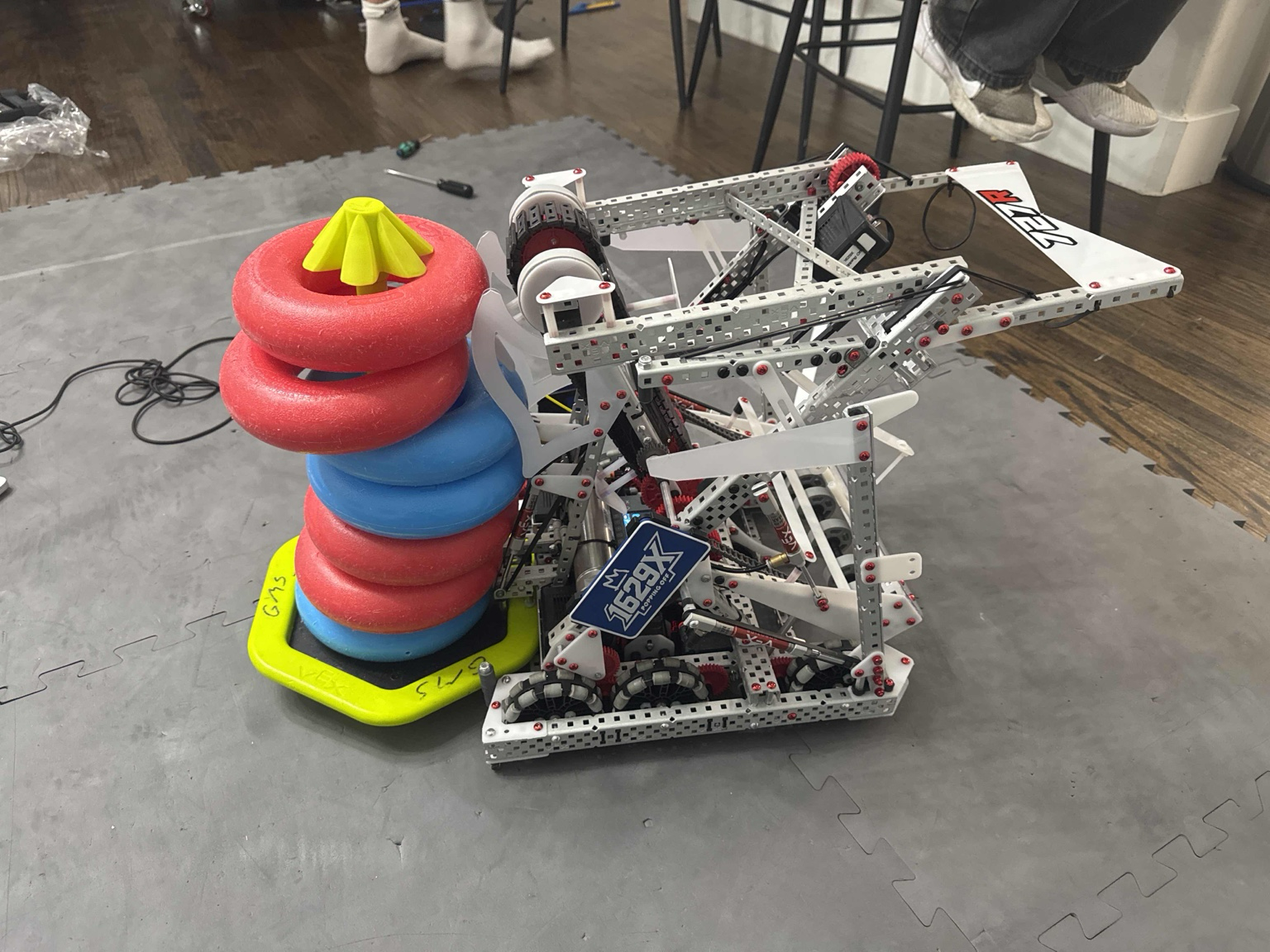
Technical Overview
- Software: RAMSETE controller, Monte Carlo localization, PID-tuned autonomous routines
- Hardware: Custom polycarbonate structure, custom drivetrain gears, compact packaging, low center of gravity
- Goal: Achieve consistent autonomous routines & rapid scoring in driver control
- Performance: 8-inch Wallstake reach & 3.2 second 6 ring cycle time.